
基于刺激響應(yīng)聚合物的人造肌肉通常表現(xiàn)出機(jī)械順應(yīng)性、多功能性和高功率重量比,顯示出有可能取代傳統(tǒng)剛性電機(jī)用于下一代軟機(jī)器人、可穿戴電子產(chǎn)品和生物醫(yī)學(xué)設(shè)備的巨大前景。特別是,熱機(jī)械液晶彈性體(LCE)構(gòu)成的人造肌肉類執(zhí)行器,可以遠(yuǎn)程觸發(fā)大行程、快速響應(yīng)和高度可重復(fù)的驅(qū)動(dòng)。與天然肌肉相比,雖然LCE的速度相對較慢且能量效率低下,但這種依賴于相位和溫度的聚合物鏈構(gòu)象變化仍會(huì)導(dǎo)致肌肉樣、大、可逆的宏觀形狀變形。據(jù)報(bào)道,具有單軸排列的LCE表現(xiàn)出高達(dá)400%的自發(fā)長度變化,但它們的整體變形主要限于單自由度(DOF)拉伸行程。此外,肌肉雖然同樣限于收縮驅(qū)動(dòng),但可以以實(shí)現(xiàn)幾乎無限自由度的方式排列,如章魚觸手的肌肉靜水器附件。盡管LCE致動(dòng)器系統(tǒng)近年來已經(jīng)取得了巨大進(jìn)步,但目前還沒有包含用于控制的感覺反饋的純LCE系統(tǒng)。這種缺失可能會(huì)限制在機(jī)器人中使用LCE的好處,除非可以實(shí)現(xiàn)傳感的無縫集成。
鑒于此,美國康奈爾大學(xué)Robert F. Shepherd教授團(tuán)隊(duì)引入了兩個(gè)新概念來解決目前的挑戰(zhàn):(1)在3D打印LCE軟執(zhí)行器中使用數(shù)字光處理(DLP);(2)使用機(jī)械應(yīng)變的光電測量,使打印的LCE執(zhí)行器具有自感知功能。通過內(nèi)置的剪切分離機(jī)制實(shí)現(xiàn)了LC介晶元的剪切流誘導(dǎo)對準(zhǔn),并制作了用于可編程彎曲和大拉伸行程的單片LCE驅(qū)動(dòng)器。這些驅(qū)動(dòng)基元在3D打印LCE軟執(zhí)行器的最高工作能力下允許操作和運(yùn)動(dòng)模式(握力、爬行和舉重)。此外,通過使用適用于機(jī)器人、柔性電子和醫(yī)療設(shè)備的光電子技術(shù)還實(shí)現(xiàn)LCE執(zhí)行器的實(shí)時(shí)反饋。相關(guān)工作以“Digital light processing of liquid crystal elastomers for self-sensing artificial muscles”為題發(fā)表在國際頂級期刊《Science Advances》上。
熱機(jī)械液晶彈性體的制備及數(shù)字光處理
為了配制LCE液體樹脂,研究人員選擇了一鍋硫醇-丙烯酸酯/硫醇-烯點(diǎn)擊反應(yīng)(圖1A)。用于合成熱機(jī)械LCE的介晶單體分別是RM257和RM82、柔性連接劑為EDDT和三乙烯基交聯(lián)劑(TATATO)。由于混合物缺乏在室溫下連續(xù)DLP實(shí)驗(yàn)優(yōu)選的流動(dòng)特性(T m=41°C),采用二氯甲烷(DCM)和四氫呋喃(THF)輔助來改變其流變行為,揮發(fā)性溶劑在印刷后被去除。添加1% (wt%)的光引發(fā)劑二苯基(2,4,6-三甲基苯甲酰基)氧化膦(TPO)可實(shí)現(xiàn)高效光固化,在紫外線(UV)照射3秒內(nèi)實(shí)現(xiàn)近90%的凝膠化(UV投影儀:λ = 405 nm, I = 11.4 mW cm -2)。通過使用商用桌面DLP 3D打印機(jī)Ember制造LCE執(zhí)行器,主要是因?yàn)槠鋬?nèi)置的剪切分離機(jī)制。樹脂托盤循環(huán)旋轉(zhuǎn)的示意圖如圖1D所示,最初設(shè)置是為了減少打印部件和構(gòu)建窗口之間的吸力,這種旋轉(zhuǎn)運(yùn)動(dòng)被重新編程以實(shí)現(xiàn)對LCE中導(dǎo)向器對齊的空間控制。當(dāng)在每個(gè)薄層(20 μm)上滑動(dòng)時(shí),施加在可光聚合LCE液體樹脂上的剪切力使柔性聚合物鏈主鏈中的LC介晶對齊。在松弛的時(shí)間尺度內(nèi),聚合物鏈通過投射的紫外光聚合和交聯(lián),以鎖定面內(nèi)取向順序,形成低模量主鏈LCE。這種對準(zhǔn)程序類似于在有限空間內(nèi)制造LCE微致動(dòng)器的成熟剪切流場方法。除了在沒有預(yù)交聯(lián)的情況下實(shí)現(xiàn)LCE機(jī)械取向的內(nèi)置剪切對齊之外,用于選擇性光聚合的紫外線的空間和時(shí)間控制進(jìn)一步實(shí)現(xiàn)了與高分辨率并行的眾多致動(dòng)器的快速制造。為了抑制每一層聚合樹脂粘附在構(gòu)建窗口上,研究人員用聚甲基戊烯(PMP)代替了傳統(tǒng)的聚二甲基硅氧烷(PDMS),因?yàn)镻MP的表面張力低得多(<20 mN m -1),透氧性更高和出色的透光率(25 mm樣品在405 nm處>90%)。通過重新編程樹脂托盤的滑動(dòng)運(yùn)動(dòng),實(shí)現(xiàn)了快速接近速度和使剪切分離力最大化的緩慢分離速度。
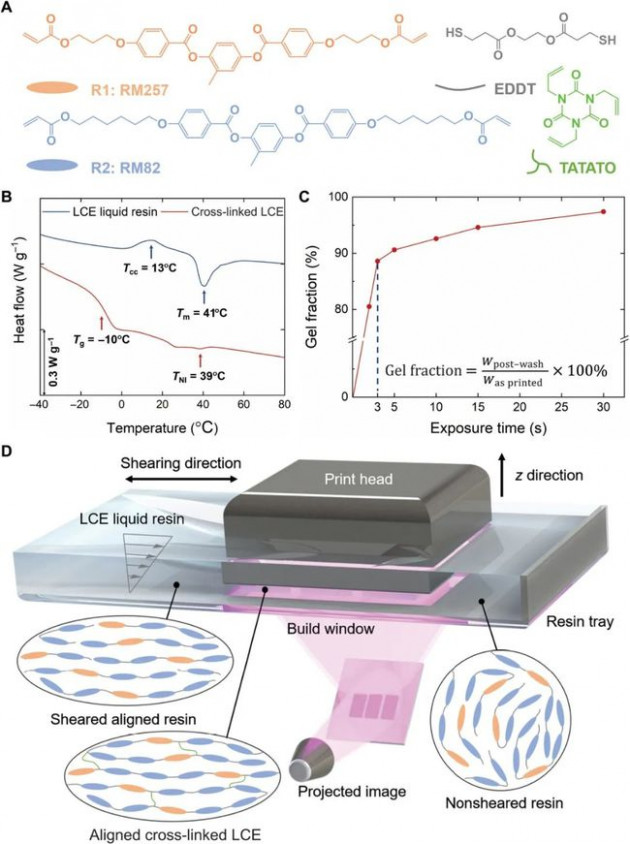
圖1 熱機(jī)械液晶彈性體的數(shù)字光處理
LCE的對象操作和不受限制的運(yùn)動(dòng)
為了證明打印的LCE的對象操縱能力,研究人員打印了一個(gè)夾子(尺寸,18 mm×15 mm×0.2 mm;m = 75 mg)。連接到質(zhì)心的L形細(xì)繩懸掛LCE夾持器并協(xié)助舉起更重的物體,例如金屬彈簧(m= 600 mg)。當(dāng)夾持器接近預(yù)熱的彈簧時(shí),它會(huì)沿著垂直于其剪切打印方向的軸卷曲,并在沒有任何外部控制的情況下纏繞在彈簧上。通過將自動(dòng)抓握的彈簧轉(zhuǎn)移到接收器容器中,即使在不斷扭動(dòng)琴弦時(shí)LCE抓手也可以保持牢固的抓握力超過25秒。此外,研究人員還通過利用局部熱刺激演示了軟機(jī)器人的爬行(尺寸,118 mm×15 mm×0.2 mm)。受氣動(dòng)四足動(dòng)物步態(tài)序列的啟發(fā),波動(dòng)序列設(shè)計(jì)為四個(gè)步驟,從靜止?fàn)顟B(tài)開始:(i)加熱前肢(大約前三分之一段)通過將前緣靠在錨定點(diǎn)上來拉起機(jī)器人;(ii)加熱軀干(大約中間三分之一部分)進(jìn)一步抬起脊椎并將后緣拖向其先前位置之前的新錨定點(diǎn);(iii)加熱后肢(大約后三分之一段)使其彎曲到更大的程度,儲(chǔ)存彈性能量關(guān)閉熱量,釋放彈性能量與依次放松前肢、軀干和后肢相結(jié)合,推動(dòng)機(jī)器人向前推進(jìn),進(jìn)入新的休息狀態(tài),為另一個(gè)驅(qū)動(dòng)序列做好準(zhǔn)備。LCE軟機(jī)器人在棘輪表面上移動(dòng)速度為20 mm min-1。
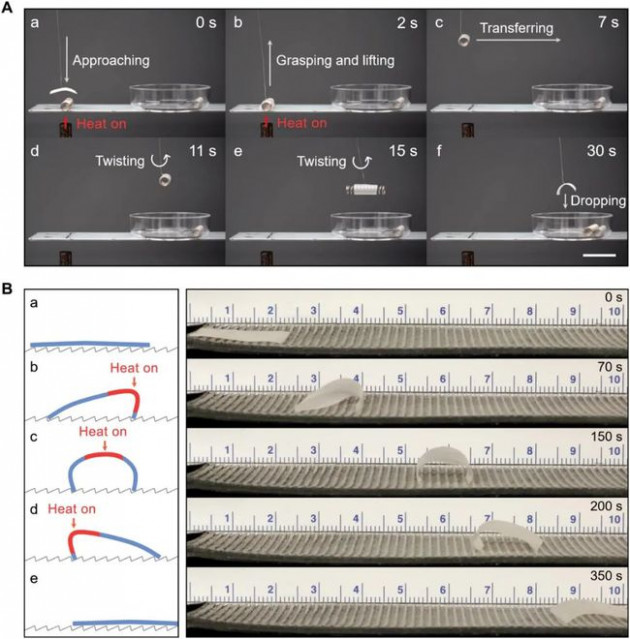
圖2 LCE的對象操作和移動(dòng)
當(dāng)在剪切打印方向上連接到懸掛重物時(shí),LCE聚合物網(wǎng)絡(luò)沿相同方向拉伸,所有棒狀LC介晶與聚合物主鏈平行排列。通過這種方式,彎曲致動(dòng)器可以轉(zhuǎn)化為線性致動(dòng)器。為了展示它們的舉重能力并衡量這些印刷LCE的工作能力,研究人員制造了狗骨形執(zhí)行器。通過將衣架和重物安裝到執(zhí)行器的肩膀上,只有儀表部分(尺寸,25 mm×2 mm×0.8 mm)暴露在施加熱機(jī)械收縮力以響應(yīng)施加的熱量。結(jié)果表明,每單位質(zhì)量執(zhí)行器所做的功(m = 56 mg),幾乎與加載重量的質(zhì)量成正比,最大為40 g(執(zhí)行器自重的700 多倍),驅(qū)動(dòng)應(yīng)變逐漸衰減。最值得注意的是,該系統(tǒng)完成的最大特定功為 63 J kg-1,高于大多數(shù)3D打印LCE和人類骨骼肌,這歸因于增加的致動(dòng)器厚度的增加。
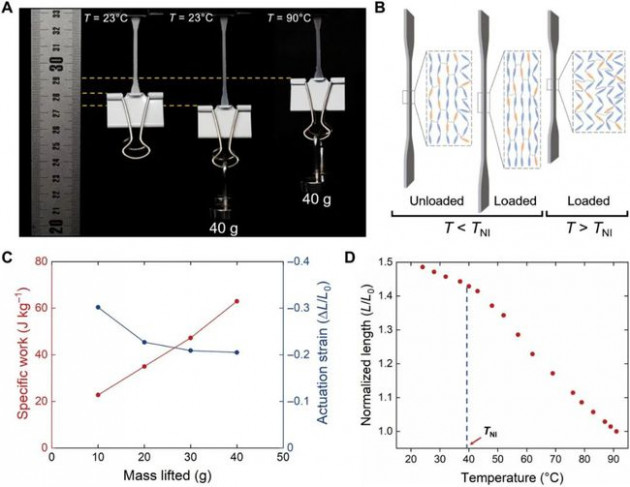
圖3 LCE執(zhí)行器的舉重運(yùn)動(dòng)
LCE執(zhí)行器的光機(jī)自感特性
類似于在現(xiàn)代顯示技術(shù)中使用液晶,形狀記憶LCE也可以操縱光學(xué)雙折射進(jìn)行光機(jī)械轉(zhuǎn)換,例如溫控變形傳感器。研究人員通過將微型光電元件與彎曲致動(dòng)器耦合,將光學(xué)傳感嵌入到LCE矩陣中(如圖4)。DLP打印的LCE懸臂執(zhí)行器(尺寸,15 mm×5 mm×0.8 mm)可以經(jīng)歷兩種彎曲變形模式,即熱誘導(dǎo)(例如,90°C陣風(fēng);模式1)或非熱誘導(dǎo)(例如切換導(dǎo)致彎曲;模式2)。在模式1中,最初不透明的多疇LCE在響應(yīng)熱刺激進(jìn)入各向同性狀態(tài)時(shí)變得對光透明。例如,這種光學(xué)清晰度允許耦合光束通過紅外發(fā)光二極管(LED)從一端傳播;一些輻射到環(huán)境中,其余的在另一端反射回來,隨后被放置在光源旁邊的光電探測器接收。通過這種方式可以測量有損LCE波導(dǎo)的光信號以指示其自身的彎曲變形。在模式2中,雖然彎曲的幅度相似,但LCE保持其多疇狀態(tài)完整,防止耦合光束傳播,因此,光電探測器將不會(huì)捕獲顯著的信號變化。該原型演示將軟熱機(jī)械驅(qū)動(dòng)與之前在其他類別的軟執(zhí)行器中使用的光電應(yīng)變傳感相結(jié)合,引入了用于電位反饋控制的自感應(yīng)LCE執(zhí)行器。相同的原理也可以擴(kuò)展到多疇-單疇相變,用于監(jiān)測同一材料系統(tǒng)中的伸長率和隨之而來的硬化。
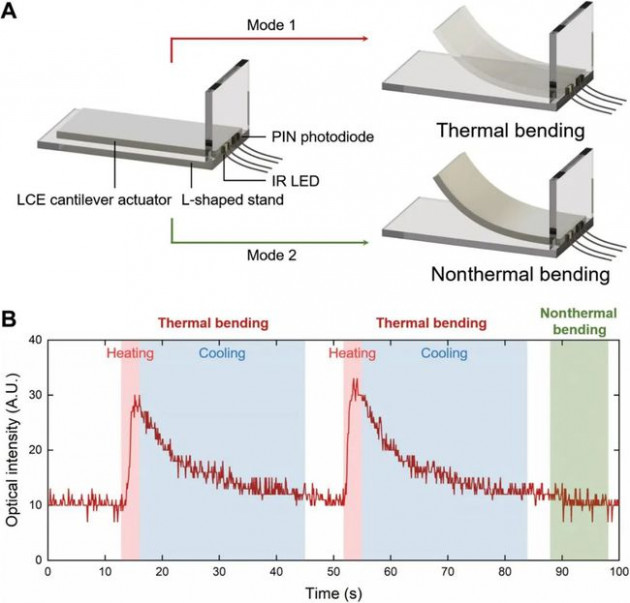
圖4
小結(jié):作者介紹了一種基于數(shù)字光處理(DLP)的增材制造方法,該方法逐層自動(dòng)剪切對齊介晶低聚物,以在光交聯(lián)結(jié)構(gòu)中實(shí)現(xiàn)高取向順序;這種排序產(chǎn)生高比功(63 J kg-1)和能量密度(0.18 MJ m-3)。展示了由DLP打印的LCE執(zhí)行器在軟機(jī)器人中的應(yīng)用,例如可逆抓取、無繩爬行和舉重。此外,作者還提出了一種LCE自感系統(tǒng),該系統(tǒng)利用熱致光學(xué)躍遷作為反饋控制的內(nèi)在選擇,使該領(lǐng)域更進(jìn)一步朝著LCE中的自然肌肉樣感覺運(yùn)動(dòng)系統(tǒng)邁進(jìn)。
全文鏈接:
https://advances.sciencemag.org/content/7/30/eabg3677